
IMPROVER
Improver takımımız tarafından tasarlanan ilk araçtır. Araç tasarım sürecinde aracın düşük maliyetli, darbelere ve çevre şartlarına dayanıklı, kolay monte/demonte edilebilir olması ana kriterler arasında yer almıştır. Tasarım süreci tamamlanmış olup üretime başlanmıştır. Aracımız birçok alt sistemin birleşmesiyle meydana gelmektedir. Bu sistemlerin detaylarına aşağıda yer verilmiştir.
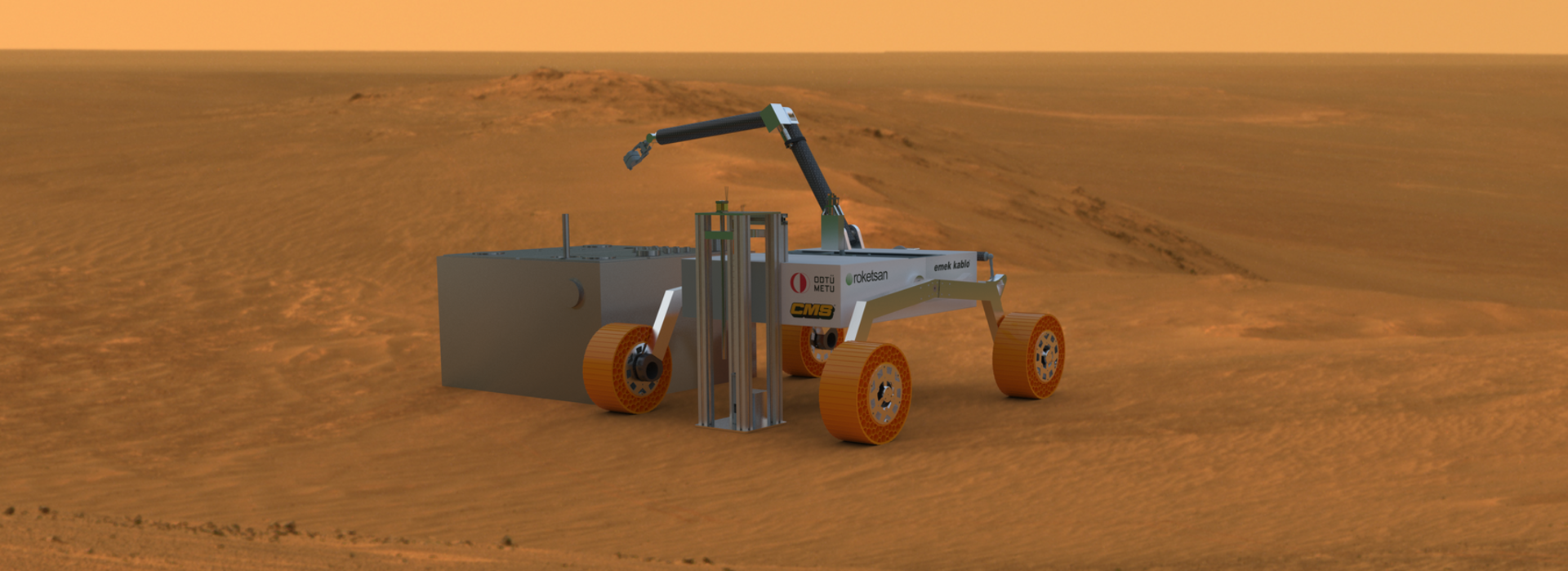
YÜRÜR SİSTEM
Aracımızın şasisi montaj kolaylığının sağlanabilmesi adına alüminyum kutu ve sigma profiller kullanılarak tasarlanmıştır. Aracın içerisinde bulunması gereken elemanlar dikkate alınarak şasinin ölçüleri belirlenmiştir.
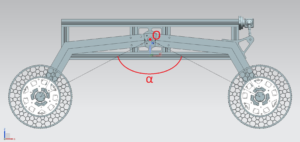
Aracımızın zorlu arazi şartlarında en iyi şekilde hareket edebilmesi için “Rocker Pasif Süspansiyon Sistemi” kullanılmıştır. Bu sistem sayesinde aracın herhangi bir engel üzerinden geçerken yerle temasını maksimum ölçüde sağlayabilmesi hedeflenmiştir. Gerekli analizler yapılarak teması maksimum ölçüde sağlamak üzere “Rocker” mekanizmasının elemanları tasarlanmıştır. Buna ek olarak şasiyi tekerlere bağlayan kollar üzerinde analizler yapılarak ölçülerine karar verilmiştir.
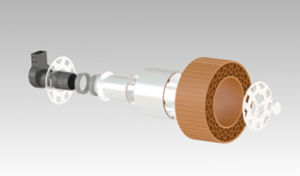
Tekerlekler yürür sistemin en önemli parçalarındandır. Yapılan tasarımda yürür sistem motorları tekerleklerin içerisinde bulunmaktadır. Bu sayede motorların herhangi bir engele çarparak zarar görmemeleri hedeflenmektedir. Aracın üstünden geçmesi gereken engeller göz önünde bulundurularak tekerlek boyutlarına karar verilmiştir.

Aracın üzerinde araç üzerine gelecek şokları emebilecek aktif bir süspansiyon sistemi bulunmamaktadır. Bu yüzden tekerleklerin gelen şokları iyi derecede emebilmesi çok önemlidir. Bu şokları emmek amacıyla tekerleğin geometrisi üzerine dinamik analizler yapılmış ve tekerleğin FDM metoduyla esnek TPU filament kullanılarak üretilmesine karar verilmiştir. Yapılan analizler sonucu aracın çıkabileceği maksimum eğim ve üzerinden geçebileceği engeller saptanmıştır.
ROBOT KOL
 Robot kol sistemi yarışmadaki Bakım, Bilim, Toplama görevlerinin tamamlanması açısından büyük önem taşımaktadır. Robot kolun ulaşması gereken noktalar dikkate alınarak kinematik analizler yapılıp robot kol elemanlarının ölçülerine ve robot kolun 6 serbestlik derecesine sahip olmasına karar verilmiştir. Sisteme etki eden yükler hesaba katılarak stres analizleri yapılmış, parça ölçüleri ve kullanılacak malzemelere karar verilmiştir.Buna ek olarak yine sisteme etki edecek kuvvetler dikkate alınarak robot kol sistem motorları seçilmiştir.
Robot kol sistemi yarışmadaki Bakım, Bilim, Toplama görevlerinin tamamlanması açısından büyük önem taşımaktadır. Robot kolun ulaşması gereken noktalar dikkate alınarak kinematik analizler yapılıp robot kol elemanlarının ölçülerine ve robot kolun 6 serbestlik derecesine sahip olmasına karar verilmiştir. Sisteme etki eden yükler hesaba katılarak stres analizleri yapılmış, parça ölçüleri ve kullanılacak malzemelere karar verilmiştir.Buna ek olarak yine sisteme etki edecek kuvvetler dikkate alınarak robot kol sistem motorları seçilmiştir.

Robot kolun gerekli görevleri yapabilmesi amacıyla robot kol için bir uç tasarımı yapılmıştır. Bu tasarımla robot kolun yüzeyden toprak numunelerini alabilmesi, panel üzerinde operasyonlar yapabilmesi, toprak üzerinde bulunan yeşil numuneleri alabilmesi hedeflenmiştir.
TOPRAK NUMUNESİ ALMA SİSTEMİ
Yarışmada Bilim görevinde üçü toprak yüzeyinden, biri toprağın 30 cm derininden olmak üzere toprak numuneleri alınması ve alınan numuneler üzerinde analizler yapılması gerekmektedir.
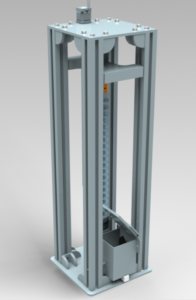
Yüzey numunelerinin alınması için robot kol sistemi kullanılacaktır. 30 cm derinden numune alınabilmesi için bir delici sistem tasarlanmıştır. Bu sistemde şaside olduğu gibi kolay monte edilebilirlik ve sağlamlık açısından alüminyum sigma profiller tercih edilmiştir. Toprak burgusunun özel geometrisi sayesinde delinen toprak yukarı taşınabilmektedir. Sistemde iki adet motor kullanılmıştır. Bu motorlardan birisi burgunun doğrusal hareketini sağlamakta diğeri ise burgunun dönüşünü sağlamaktadır.
Delici sistem ile yukarı çıkarılan toprak numunesi numune kabına alınıp üzerinde analizler yapılmaktadır. Gerekli sensörlerin kaba yerleştirilmesi ile toprağın nem, sıcaklık, ağırlık ve hacmini belirlemek üzere analizler yapılması hedeflenmektedir. Buna ek olarak düşük bütçeli bir spektrometre üretimi yapılarak toprak içerisinde yaşam bulunup bulunmadığını anlamak üzere içerisindeki elementler saptanacaktır.
ARAÇ KONTROLÜ
 Araç üzerindeki eyleyiciler enkoderlerden gelen veriler baz alınarak ROS ara yüzünde birbirinden bağımsız şekilde kontrol edilmektedir. Yürür sistem, delici sistem, robot kol sistemlerinde bulunan motorların eş zamanlı olarak ayrı ayrı kontrol edilmesi amaçlanmaktadır. Motorların verimli sürülebilmesi için takımımızca motor devre sürücüleri tasarlanmıştır.
Araç üzerindeki eyleyiciler enkoderlerden gelen veriler baz alınarak ROS ara yüzünde birbirinden bağımsız şekilde kontrol edilmektedir. Yürür sistem, delici sistem, robot kol sistemlerinde bulunan motorların eş zamanlı olarak ayrı ayrı kontrol edilmesi amaçlanmaktadır. Motorların verimli sürülebilmesi için takımımızca motor devre sürücüleri tasarlanmıştır.
GÖRÜNTÜ İŞLEME
Aracın Navigasyon görevinde hangi konumda olduğunu saptamak üzere motorların enkoderlerinden alınan veri ile alana yerleştirilmiş ARTag işaretlemeleri kullanılacaktır. ARTaglerin araca olan uzaklığı ROS kütüphanesi kullanılarak belirlenmektedir.
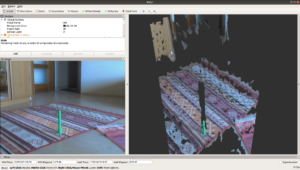
Buna ek olarak aracın Toplama görevinde yerden alacağı numunelerin konumlarının saptanması için stereo-kameralar kullanılmaktadır. Numuneler renkleri aracılığıyla saptandıktan sonra görüntü işlenerek numunenin oryantasyonu ve araca olan uzaklığı belirlenecektir.
 Bakım görevinde panonun üzerindeki elemanların ve bu elemanlarının konumlarının belirlenmesi için yine görüntü işleme ve derinlik tahmini metodları kullanılacaktır.
Bakım görevinde panonun üzerindeki elemanların ve bu elemanlarının konumlarının belirlenmesi için yine görüntü işleme ve derinlik tahmini metodları kullanılacaktır.
Bilim görevinde araç üzerindeki kameradan gelen görüntü işlenerek kameranın görüntü alanındaki toprağın rengi dikkate alınarak toprak türünün saptanması hedeflenmektedir.
ROTA PLANLAMA
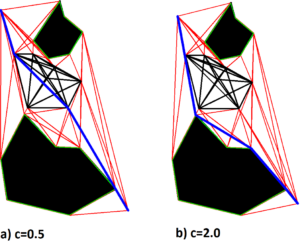
Navigasyon görevinde aracımızın konumunu saptadıktan sonra bir sonraki konuma en kısa yoldan karar verilmesi için rota planlama algoritmaları kullanılmaktadır. Buna ek olarak rota üzerinde araç herhangi bir engel ile karşılaştığında ultrasonik sensörler ve stereo-kamera ile bu engellerin ve engellere olan uzaklığın algılanması ve aracın bu engellerin etrafından dolaşarak yoluna devam edebilmesi hedeflenmektedir.
GÜÇ DAĞITIMI
Aracın kontrol noktası ile herhangi bir bağlantısı bulunmadığı için araç gerekli gücü üzerinde bulunan Li-Po bataryalardan sağlamaktadır. Güç regülasyon sistemi tarafından düzenlendikten sonra da kablolar vasıtası ile devrelere iletilmektedir.
İLETİŞİM
Araç içerisindeki sensörlerden verilerin alınması ve bu verilerin araç üzerindeki işlemcide toplanması (araç içi iletişimin sağlanması) için CAN-BUS sistemi kullanılmaktadır. CAN-BUS sistemi sayesinde kablo sayısı azaltılarak araç içi iletişimin etkin bir şekilde sağlanması hedeflenmiştir.
Yarışma içerisinde aracın komut alanından kontrol edilmesi için Wi-Fi verici-alıcıları kullanılacaktır. Wi-Fi verici-alıcıları sayesinde araçtan gerekli bilgiler alınıp araca gerekli komutların iletilmesi sağlanacaktır.